(Trang 39)
Sau khi học xong bài này, em sẽ:
Hình thành được ý tưởng, lập kế hoạch và nghiên cứu một dự án thuộc lĩnh vực robot và máy thông minh.
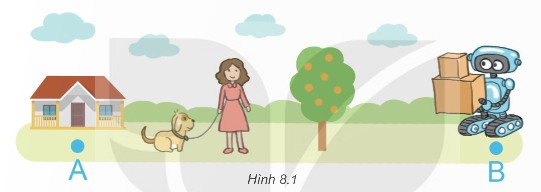
Quan sát Hình 8.1 và cho biết làm cách nào robot đi đến đích một cách an toàn?
I - GIỚI THIỆU
Robot tự hành được nghiên cứu và ứng dụng rộng rãi trong đời sống như robot vận chuyển, robot y tá, robot hút bụi hay robot cứu hộ. Đặc điểm chung của các robot này là khả năng tự di chuyển, thu nhận thông tin môi trường từ hệ thống cảm biến, xử lí dữ liệu và tác động trở lại môi trường thông qua cơ cấu chấp hành. Trong khi thực hiện nhiệm vụ, robot có khả năng di chuyển an toàn, không va chạm với vật hoặc người.
Trong bài này sẽ tìm hiểu một dự án nghiên cứu cụ thể nhằm thiết kế và chế tạo robot tự hành có khả năng phát hiện và tránh được vật phía trước với khoảng cách 30 cm. Môi trường hoạt động của robot là sàn nhà phẳng, không trơn.
II - HÌNH THÀNH Ý TƯỞNG
Ý tưởng thực hiện dự án nghiên cứu robot tự hành được hình thành thông qua việc quan sát công việc của người thu gom rác thải y tế trong bệnh viện. Người này phải làm việc trong môi trường độc hại, công việc nặng nhọc, lặp đi lặp lại. Vì thế cần có thiết bị hay máy móc thay người thu gom rác. Robot tự hành với khả năng tự di chuyển, tránh và chạm và có cơ cấu thu gom rác có thể đáp ứng được yêu cầu này.
Bên cạnh đó thông qua quá trình học tập về lĩnh vực robot và máy thông minh, học sinh muốn chuyển tải kiến thức lí thuyết thành kiến thức thực tế thông qua dự án nghiên cứu.
(Trang 40)
III - KẾ HOẠCH DỰ ÁN
1. Tên dự án và mục tiêu dự án
- Tên dự án: Thiết kế và chế tạo robot tự hành.
- Mục tiêu: Thiết kế và chế tạo một robot tự hành sử dụng cảm biến phát hiện vật cản và di chuyển sang trái để tránh và chạm. Robot hoạt động trên sàn nhà phẳng, không trơn.
2. Nhóm thực hiện
Bảng 8.1. Nhóm thực hiện dự án
| Họ và tên | Vị trí | Trách nhiệm |
| Nguyễn Văn A | Trưởng nhóm | Nghiên cứu các thành phần của robot tự hành. Chế tạo để lắp ráp mạch điện tử của robot. Thử nghiệm và lắp hồ sơ kĩ thuật. |
| Nguyễn Văn B | Thành viên | Nghiên cứu chương trình điều khiển chuyển động của robot. Thử nghiệm và lắp hồ sơ kĩ thuật. |
| Trần Thị C | Thành viên | Viết chương trình điều khiển robot. Thử nghiệm và lắp hồ sơ kĩ thuật. |
3. Lập kế hoạch nghiên cứu
Kế hoạch nghiên cứu dự án robot tự hành được phân chia thành các nội dung cụ thể như sau:
- Xác định các vấn đề nghiên cứu:
+ Robot tự hành.
+ Khả năng tránh và chạm.
- Nghiên cứu tài liệu:
+ Linh kiện, mạch điện cấu tạo nên robot tự hành.
+ Phương pháp điều khiển chuyển động robot tự hành.
- Đề xuất giải pháp
- Chế tạo thử nghiệm và hoàn thiện:
+ Chế tạo độ robot.
+ Lắp ráp mạch điện tử.
+ Lập trình điều khiển robot.
- Lập hồ sơ kĩ thuật.
4. Nguồn lực
- Thiết bị, linh kiện tại phòng thí nghiệm.
- Mua sắm thêm linh kiện nếu cần.
(Trang 41)
5. Lập kế hoạch thực hiện các công việc
Mỗi thành viên trong nhóm được phân công thực hiện nội dung nghiên cứu với thời gian thực hiện, cụ thể như mô tả Bảng 8.2. Trong quá trình thực hiện cần sự trao đổi, thảo luận giữa các thành viên trong nhóm. Báo cáo các vấn đề phát sinh với trưởng nhóm để có giải pháp kịp thời, đảm bảo đúng tiến độ của dự án.
Bảng 8.2. Kế hoạch thực hiện các công việc
DỰ ÁN: THIẾT KẾ VÀ CHẾ TẠO ROBOT TỰ HÀNH
Lịch trình thực hiện dự án
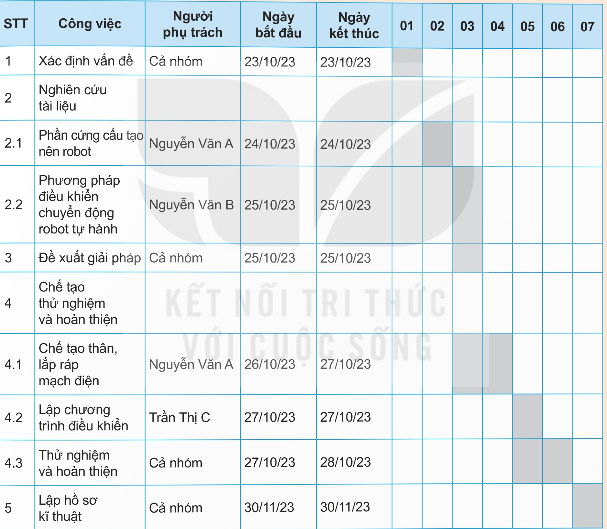
| STT | Công việc | Người phụ trách | Ngày bắt đầu | Ngày kết thúc | 01 | 02 | 03 | 04 | 05 | 06 | 07 |
| 1 | Xác định vấn đề nghiên cứu | Cả nhóm | 23/10/23 | 23/10/23 | |||||||
| 2 | Nghiên cứu tài liệu | ||||||||||
| 2.1 | Phần cứng cấu tạo nên robot | Nguyễn Văn A | 24/10/23 | 24/10/23 | |||||||
| 2.2 | Phương pháp điều khiển chuyển động robot tự hành | Nguyễn Văn B | 25/10/23 | 25/10/23 | |||||||
| 3 | Đề xuất giải pháp | Cả nhóm | 25/10/23 | 25/10/23 | |||||||
| 4 | Chế tạo thử nghiệm và hoàn thiện | ||||||||||
| 4.1 | Chế tạo thân, lắp ráp mạch điện | Nguyễn Văn A | 26/10/23 | 27/10/23 | |||||||
| 4.2 | Lập chương trình điều khiển | Trần Thị C | 27/10/23 | 27/10/23 | |||||||
| 4.3 | Thử nghiệm và hoàn thiện | Cả nhóm | 27/10/23 | 28/10/23 | |||||||
| 5 | Lắp hồ sơ kĩ thuật | Cả nhóm | 30/11/23 | 30/11/23 |